首页
关于CMHIE
CMHIE简介
组织架构
大事记
商旅服务
人才招聘
联系我们
展商服务
为何参展
展馆平面图
展商报馆
展位申请
展商服务系统
展商/产品查询
广告赞助/营销
观众服务
订阅电子快讯
采购商咨询
观展登记
展商/产品查询
参观指南
观众服务
会议&活动
会议一览表
往届论坛介绍
系列活动
资讯中心
展会动态
展商新闻
行业资讯
展会视频
图片直播
展会公告
合作媒体
媒体中心
展会宣传
展会采访
往期回顾
媒体报道
下载中心
开幕式倒计时
天
当前位置
/
展商服务
/
展商/产品查询
为何参展
展馆平面图
展商报馆
展位申请
展商服务系统
展商/产品查询
广告赞助/营销
当前位置
/
观众服务
/
展商/产品查询
展商/产品查询
Exhibitor Product Inquiry
NPICKOREA
展馆位置
展馆位置
A1馆
A1-T41
NPICKOREA
展区
人参及中医药展区
主营产品
医疗器械商品技术营业(整形外科用合成树脂铸件、拼接、截肢残疾人用人工关节和假肢制作)、成品生产设备制作、生产原材料流通、医疗器械认证海外业务支援
公司简介
"Npick Korea是提供骨科合成手枕及截肢障碍者人工关节和假肢制作服务的骨科医疗器械专门流通公司。 为了环境和个人的健康幸福生活,为社会做出贡献,向世界提供韩国的好商品和服务。 本次展示会上介绍的截肢残疾人用人工关节和假肢制作服务是韩国唯一制作的假肢零件,与零件和假肢制作公司、韩国优秀医院紧密合作,为了让残疾朋友们迈出世界一步,以细心的方法步调一致,感到非常高兴和荣幸。 本公司特别希望通过本次展示会,从中国东北地区进口假肢零件、实施假肢制作服务辅助事业、设立假肢制作学院、实施假肢残疾人相互医疗观光、研究遗影整形外科医院患者传送系统等,从多角度出发,招募能够推进事业化的多种合作伙伴。"
在线洽谈
一键拨号
+82(0)1041109254
一键拨号
在线洽谈
一键拨号
产品
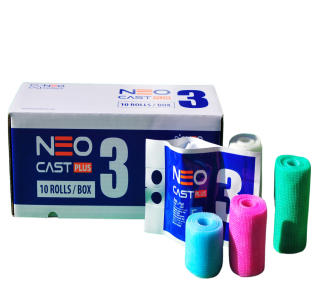
骨科用合成树脂绷带生产设备
产品介绍:
骨科用合成树脂绷带生产设备是将水硬化性合成树脂涂在面料玻璃纤维或聚酯上的机器。成品既是医疗器械,又是化学产品,在维持医疗器械所具有的商品功能和稳定性的同时,还具有实现化学产品差别化的优秀商品性。
在线洽谈
固定身体部分限制移动的产品
产品介绍:
为治疗骨折、扭伤,固定身体部分限制移动的产品
在线洽谈
假肢
产品介绍:
我们供应的假肢是拥有40年经验的假肢制作者的经验和努力的成果,在没有一名患者失败的同时,为了迈出最安全的步伐,作为身体的一部分制作假肢。 正在制作膝盖上的假肢、膝盖下的假肢、骨关节的假肢。
在线洽谈
人工膝关节
产品介绍:
现有的人工膝关节的制动功能一般是假设在平地上的一般步伐来设计的。 因此,像下坡路或下楼梯一样,步幅比在平地上行走时缩小时 .本公司为了弥补这一点,将脚踩踏机(从脚踩地面到脚完全离开地面为止的瞬间)和脚踩踏机(从脚踩地面到脚踩地面为止的瞬间)的步行动作分阶段发挥适当的制动力,以这种技术实现产品化成功了, 并完成了相应的专利注册。假肢佩戴者的体重线位于后方,由此产生的人工膝关节的适当制动力会发生不会发生的问题。 例如,膝盖未伸直(extension)的状态下步幅缩小时,假肢佩戴者的人工膝关节多少会处于弯曲状态,即乳角器弯曲。在状态下,假肢可以踩在地面上,此时假肢佩戴者在人工膝关节的制动力解除的状态下,可以将体重装载到假肢上,因此,人工膝关节意外弯曲,可能会发生摔倒的问题。 另外,假肢佩戴者意识到人工膝关节的制动力解除,在人工膝关节完全展开的状态下,即保持脚踝弯曲的状态下坡或下楼梯,此时体重线 由于位于假肢的后方,可能会发生假肢佩戴者的走路不自然的问题。
在线洽谈
防止外侧摔倒的支撑作用
产品介绍:
内侧为三排结构, 外侧为两排结构 假肢使用者的一般步行时向内侧转换方向时,因体重的压迫,外侧的双排结构与收缩相比,内侧的3排结构的碳纤维弹性比外侧的收缩相对增多,容易向内侧转换,外侧的2排结构比内侧的3排结构收缩相对较少,步行时起到防止外侧摔倒的支撑作用 另外,脚底第1排和第2排的X形态结构在步行时因负荷而左侧。可实现右水平倾斜,在侧面或斜坡上也能发挥脚踝的柔软性,起到多点划痕作用。
在线洽谈
连接插座和人工膝盖的核心部件
产品介绍:
本商品是连接插座和人工膝盖的核心部件,与插座连接后可旋转360度,将中心轴移动至左右1~10mm,是世界唯一的商品。
在线洽谈
官方
客服
微信扫码咨询客服
服务时间
上午8:30-下午17:00
其他时间如有问题请留言我
们会在工作时间给您回复。
点击进入留言
一键拨打电话
留言
姓名
电话
问题
备注
提交留言
首页
关于CMHIE
CMHIE简介
组织架构
大事记
商旅服务
人才招聘
联系我们
展商服务
为何参展
展馆平面图
展商报馆
展位申请
展商服务系统
展商/产品查询
广告赞助/营销
观众服务
订阅电子快讯
采购商咨询
观展登记
展商/产品查询
参观指南
观众服务
会议&活动
会议一览表
往届论坛介绍
系列活动
资讯中心
展会动态
展商新闻
行业资讯
展会视频
图片直播
展会公告
合作媒体
媒体中心
展会宣传
展会采访
往期回顾
媒体报道
下载中心
文件列表
 展馆位置
展馆位置 在线洽谈
在线洽谈 一键拨号
一键拨号












 展区
展区
